我们通过几个问题来介绍InnoDB存储引擎
LBCC VS MVCC
Lock Based Concurrency Control(LBCC)
保证前后两次读取数据一致,那么我读取数据的时候,锁定我要操作的数据,不允许其他的事务修改就行了。如果仅仅是基于锁来实现事务隔离,一个事务读取的时候不允许其他时候修改,那就意味着不支持并发的读写操作,而我们的大多数应用都是读多写少的,这样会极大地影响操作数据的效率。
MVCC Multi Version Concurrency Control(MVCC)
MVCC是InnoDB存储引擎为了实现事务的隔离级别而引入的一种乐观锁机制。
如果要让一个事务前后两次读取的数据保持一致,那么我们可以在修改数据的时候给它建立一个备份或者叫快照,后面再来读取这个快照就行了。
MVCC的目的在于:我可以查到在我这个事务开始之前已经存在的数据,即使它在后面被修改或者删除了。在我这个事务之后新增的数据,我是查不到的。
Undo Log
Undo log: 是什么? 通过它解决了什么问题? 数据的多个版本,临时写在undo log中,并通过链表管理起来。
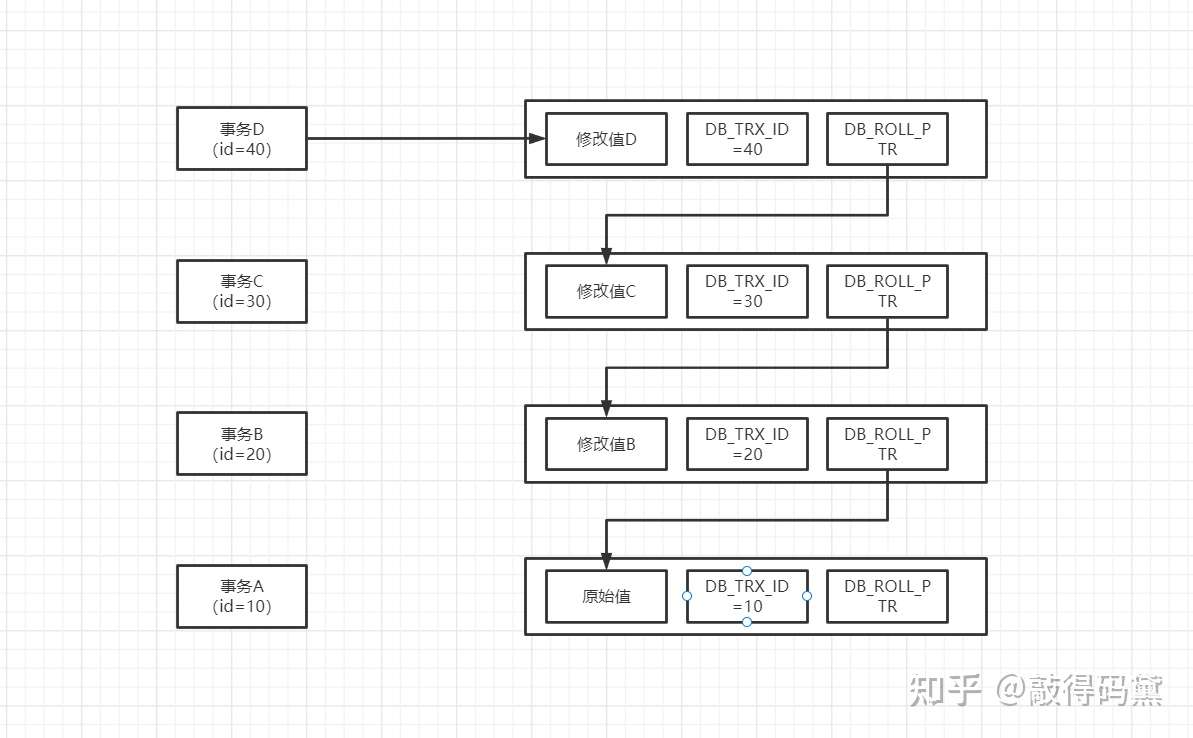
InnoDB为数据库中的每一行添加了三个隐藏字段:DB_TRX_ID(事务版本号)、DB_ROLL_PTR(回滚指针)、DB_ROW_ID(隐藏ID)。
- DB_TRX_ID:记录了创建/更新这条数据的事务版本号(版本号会递增)。
- DB_ROLL_PTR:记录了一个指向undo log中历史版本的数据指针。(用来支持回滚操作)
- DB_ROW_ID:一个自增的隐藏行ID。
InnoDB基于事务版本号、回滚指针这两个字段,可以在undo log中形成一个单向链表,最新版本的数据放在链表头部,历史数据通过DB_ROLL_PTR指针进行关联。如下图所示
MVCC
一致性读视图包括:视图数组(活跃的事务) + 高水位(已经创建过的事务ID + 1)
InnoDB在事务开启后执行第一个查询时,会创建一个快照(下文称之为ReadView),这个ReadView包含了以下信息
- m_ids: 活动事务id列表(活动事务指的是已经开始、尚未提交/回滚的事务)
- min_trx_id: 最小活动事务id
- max_trx_id: 最大活动事务id
- creator_trx_id:当前事务id
紧接着InnoDB会通过查询语句定位到最新版本的数据行,并根据以下规则获取到可以访问的数据版本。
- 如果被访问版本的trx_id,与readview中的creator_trx_id值相同,表明当前事务在访问自己修改过的记录,直接返回该版本的数据;
- 如果被访问版本的trx_id,小于readview中的min_trx_id值,表明生成该版本的事务在当前事务生成readview前已经提交,直接返回该版本的数据;
- 如果被访问版本的trx_id,大于或等于readview中的max_trx_id值,表明生成该版本的事务在当前事务生成readview后才开启,此时该版本不可以被当前事务访问,需要通过隐藏的回滚指针从undo log中读取历史版本;
- 如果被访问版本的trx_id,在readview的min_trx_id和max_trx_id之间,则需要判断trx_id值是否在m_ids列表中?
(1)如果在:说明readview创建时,创建该版本数据的事务还未提交,因此需要通过回滚指针读取历史版本并返回。
(2)如果不在:说明readview创建时,创建该版本数据的事务已经提交,所以直接返回该版本的数据;
InnoDB如何解决各种隔离问题
第一、InnoDB是如何解决脏读问题的?
如果是读已提交,那么事务每一个语句执行前都会重新计算出新的视图,也就解决了脏读问题。
第二、InnoDB是如何解决不可重复读问题的?
如果是可重复读,那么事务开启时创建一次访问视图。同一个事务中后续所有的查询共用一个ReadView,由此便解决了不可重复读的问题。
第三、InnoDB是如何解决幻读问题的?
快照读、锁定读:了解这两种读取方式的发生时机以及如何实现的?
快照读是指通过MVCC实现的非阻塞读,常见的快照读操作如下:
select xxx from xxx
当前读也叫加锁读,每次读取数据都是读取数据的最新版本,并且会对其进行加锁。常见的当前读操作如下
- select xxx from xxx lock in share mode (共享锁/读锁)
- select xxx from xxx for update (排它锁/写锁)
- update 、delete、insert
为什么要区分这两种读操作呢?因为MVCC并不能解决幻读的问题。即使是在可重复读级别,通过当前读依然会出现幻读问题。
此问题最终是通过间隙锁(next-key lock)来解决的。
InnoDB是如何解决事务的持久性问题

redo log buffer (内存中)是由首尾相连的四个文件组成的,它们分别是:ib_logfile_1、ib_logfile_2、ib_logfile_3、ib_logfile_4。
- write pos 是当前记录的位置,一边写一边后移,写到第 3 号文件末尾后就回到 0 号文件开头。
- checkpoint 是当前要擦除的位置,也是往后推移并且循环的,擦除记录前要把记录更新到数据文件。
- write pos 和 checkpoint 之间的是“粉板”上还空着的部分,可以用来记录新的操作。
- 如果 write pos 追上 checkpoint,表示“粉板”满了,这时候不能再执行新的更新,得停下来先擦掉一些记录,把 checkpoint 推进一下。
- 有了 redo log,当数据库发生宕机重启后,可通过 redo log将未落盘的数据(check point之后的数据)恢复,保证已经提交的事务记录不会丢失,这种能力称为crash-safe。
Redo log是什么? 通过它解决了什么问题?
redo log是InnoDB存储引擎为了解决事务持久性而引入的WAL技术。借助redo log,InnoDB存储引擎将事务的commit提交简化为一次内存操作与一次磁盘写入操作。如果磁盘页中的数据发生了丢失,也就是在崩溃恢复过程中,存储引擎会通过重做redo log中的操作来进行数据恢复。
binlog又是什么?他是干什么用的? 了解主从同步原理。
binlog是Mysql server层为了解决主从数据同步而引入的一套日志系统。binlog中记录的是一个数据行发生了什么操作。

Redo Log与binlog的两阶段提交
- prepare阶段,先写入rede log(状态为准备中)
- 写入binlog(状态为已提交)—- TX_ID
- commit阶段,写入redo log(状态为已提交)
而两阶段提交就是让这两个状态保持逻辑上的一致。redolog 用于恢复主机故障时的未更新的物理数据,binlog 用于备份操作。两者本身就是两个独立的个体,要想保持一致,就必须使用分布式事务的解决方案来处理。
为什么需要两阶段提交呢?
如果不用两阶段提交的话,可能会出现这样情况
先写 redo log,crash 后 bin log 备份恢复时少了一次更新,与当前数据不一致。
先写 bin log,crash 后,由于 redo log 没写入,事务无效,所以后续 bin log 备份恢复时,数据不一致。
两阶段提交就是为了保证 redo log 和 binlog 数据的安全一致性。只有在这两个日志文件逻辑上高度一致了才能放心的使用。
在恢复数据时,redolog 状态为 commit 则说明 binlog 也成功,直接恢复数据;如果 redolog 是 prepare,则需要查询对应的 binlog事务是否成功,决定是回滚还是执行。
InnoDB的几个关键特性
insert buffer、double write、自适应hash索引、异步写等
参考:
https://blog.csdn.net/hahazz233/article/details/125372412